智能汽车虚拟仿真测试平台
实验功能及效果:
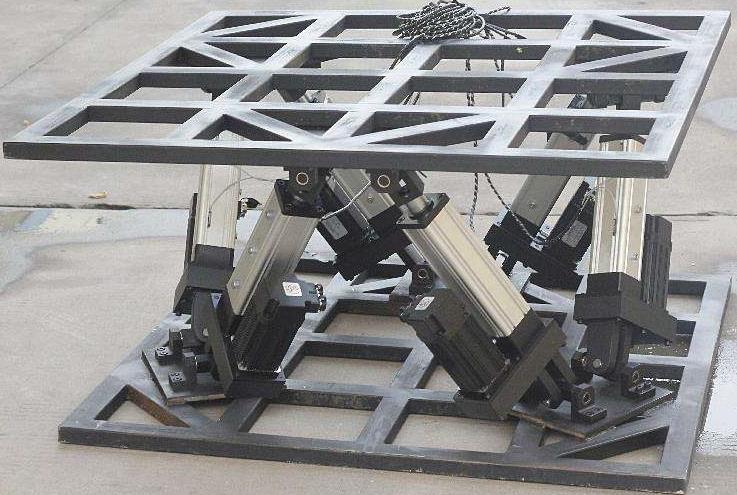
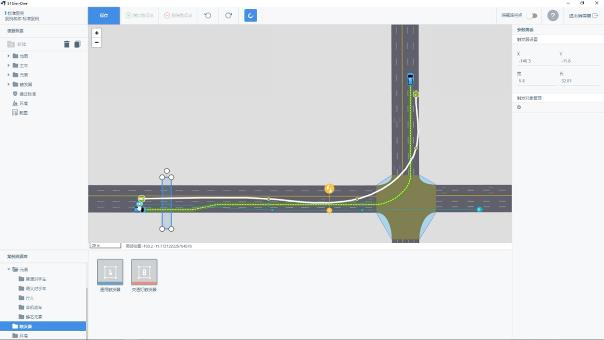
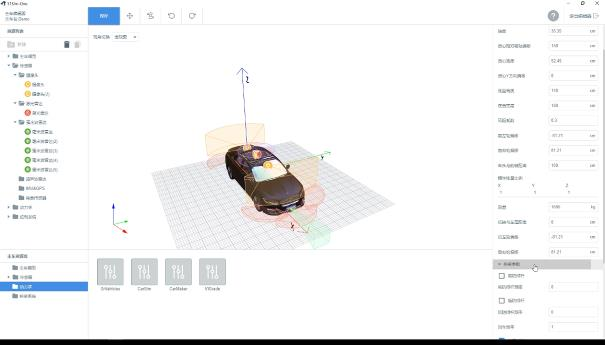
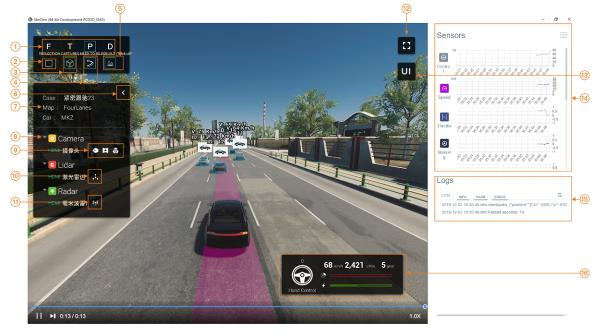
整合环境感知仿真软件PreScan、规划决策仿真开发工具箱Matlab/simulink与交通流仿真软件Vissim,建设智能汽车虚拟仿真测试平台,用于智能车辆感知决策控制算法验证;该平台具备高精度、高实时性的仿真特点,且具有较强沉浸感,能够实现交通车辆与智能车辆间行为交互影响,进而为算法的快速验证提供高真实性仿真环境。仿真平台软件部署在私有云上,具备远程访问、仿真管理及相应接口开放的功能;仿真平台硬件主要由六轴模拟器、乘用车驾驶舱、视景系统硬件及服务器集群组成。
具体实验流程:
1. 开发仿真平台软件系统:搭建虚拟仿真平台,接入自动驾驶系统和交通仿真流,建立车辆模型和传感器仿真模型;内置高精度场景,实现环境精确还原;支持高精度地图编辑和导入;利用投影融合软件进行图像校正处理。
2. 搭建仿真平台硬件系统:使用六轴模拟器与虚拟仿真系统对接;对乘用车驾驶舱内各执行控制器进行集成;采用三通道连续视场的正投弧幕进行显示;组建服务器集群和监控系统硬件。
3. 配置软硬件安全保障系统,确保系统的安全工作状态,保障使用者安全。